Quaffle
the amazing quadrotor that seesby Daniel L. Lu, Richard Lee, and Anson Liang
Objectives
» Make a quadrotor that is capable of flying autonomously.
» Write object recognition software for obstacle avoidance.

Progress
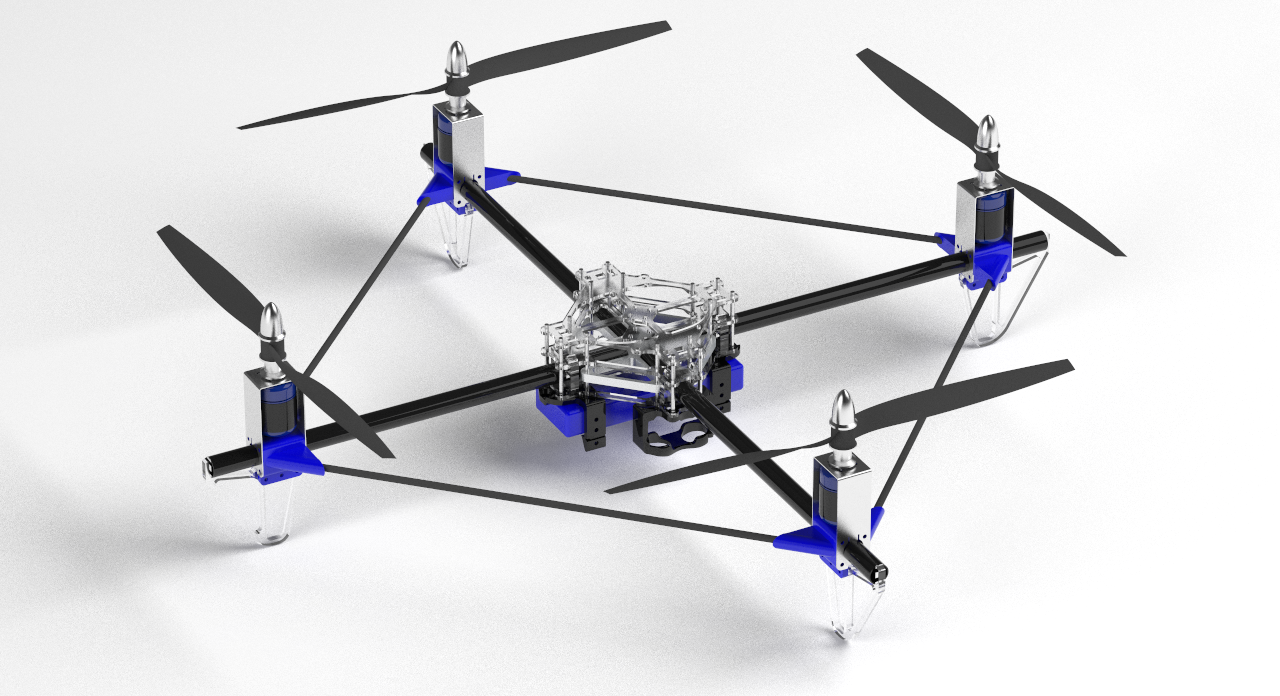
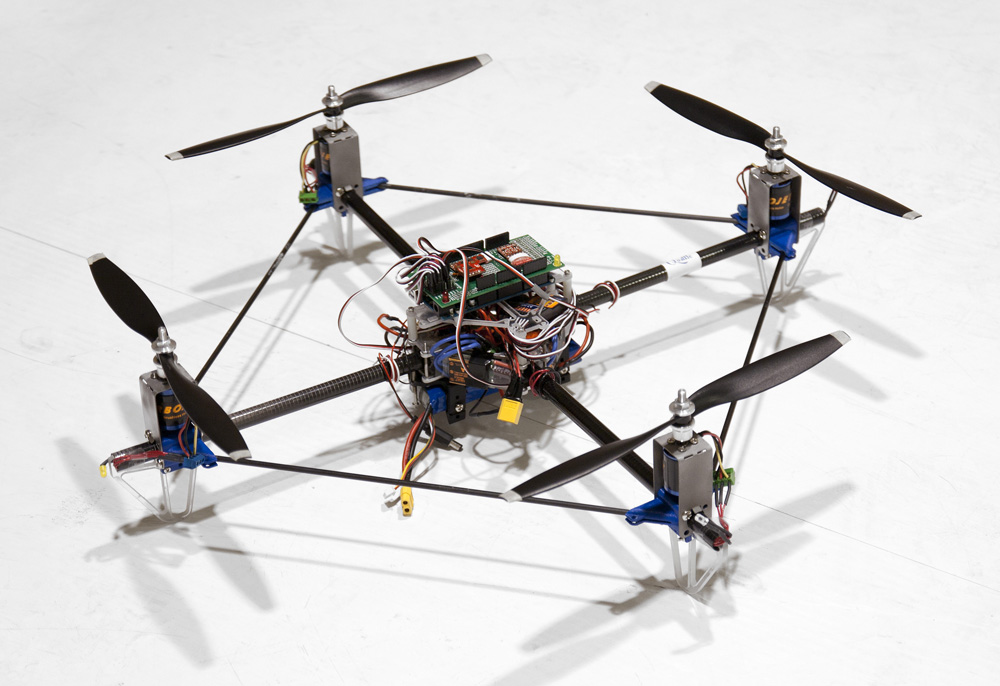
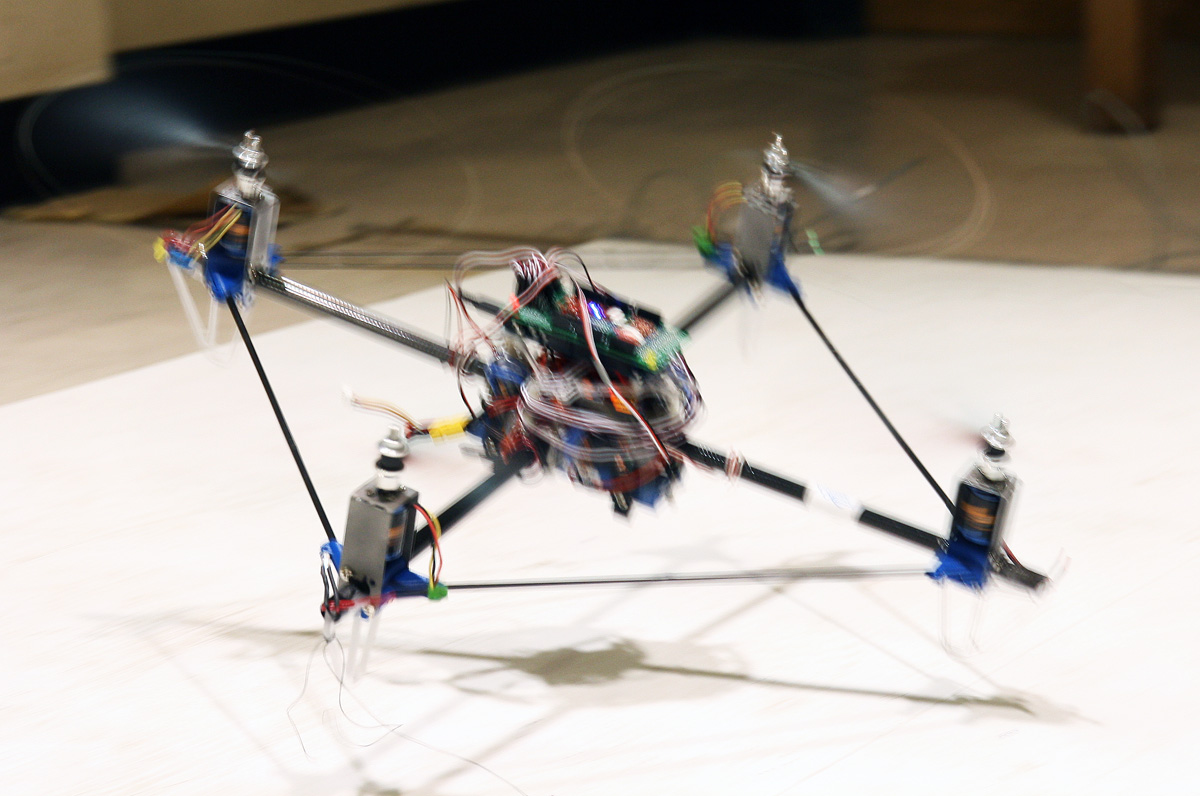
» Made a new quadrotor chassis.
» Made a new quadrotor chassis.
aluminium centre piece
» Made a new quadrotor chassis.
polycarbonate circuit mount
» Made a new quadrotor chassis.
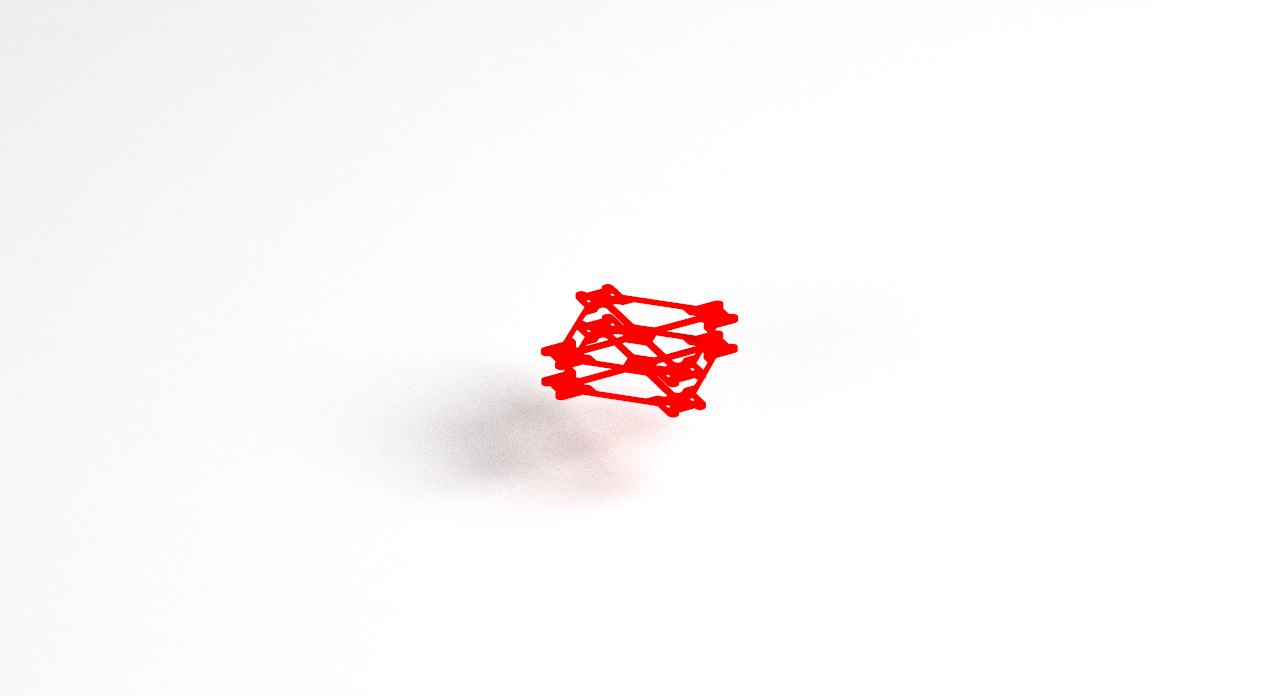
polycarbonate center pieces
» Made a new quadrotor chassis.
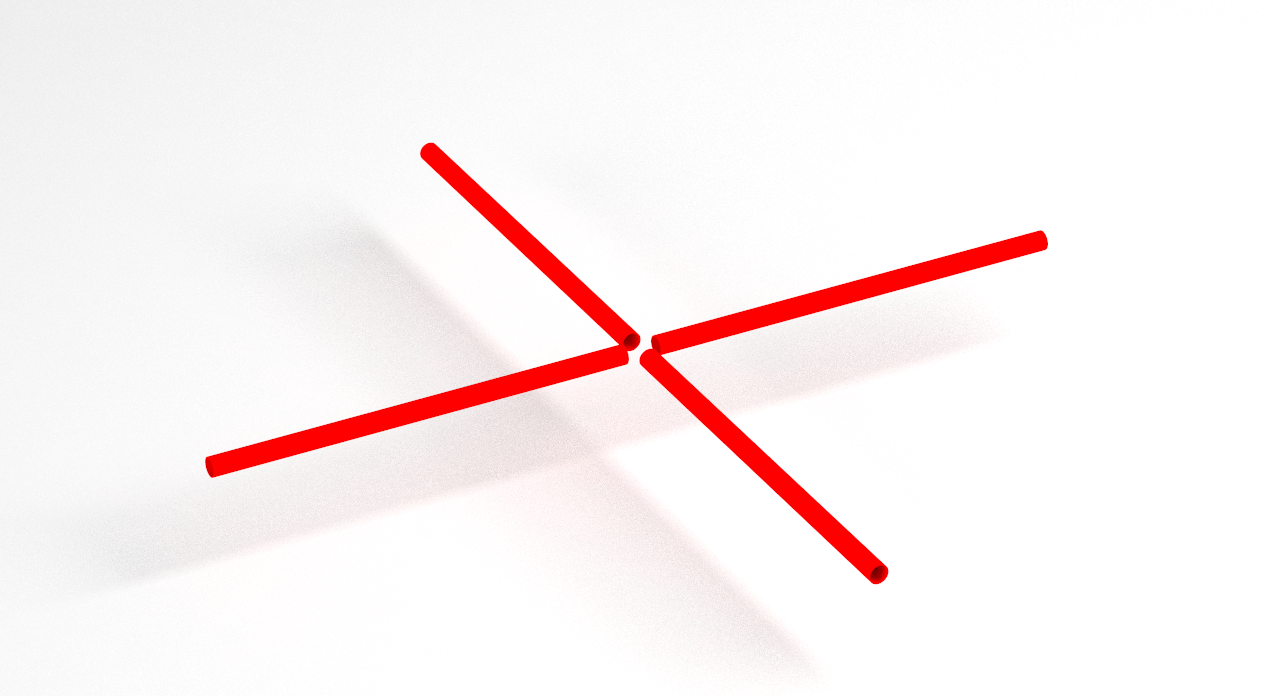
main carbon fibre arms
» Made a new quadrotor chassis.
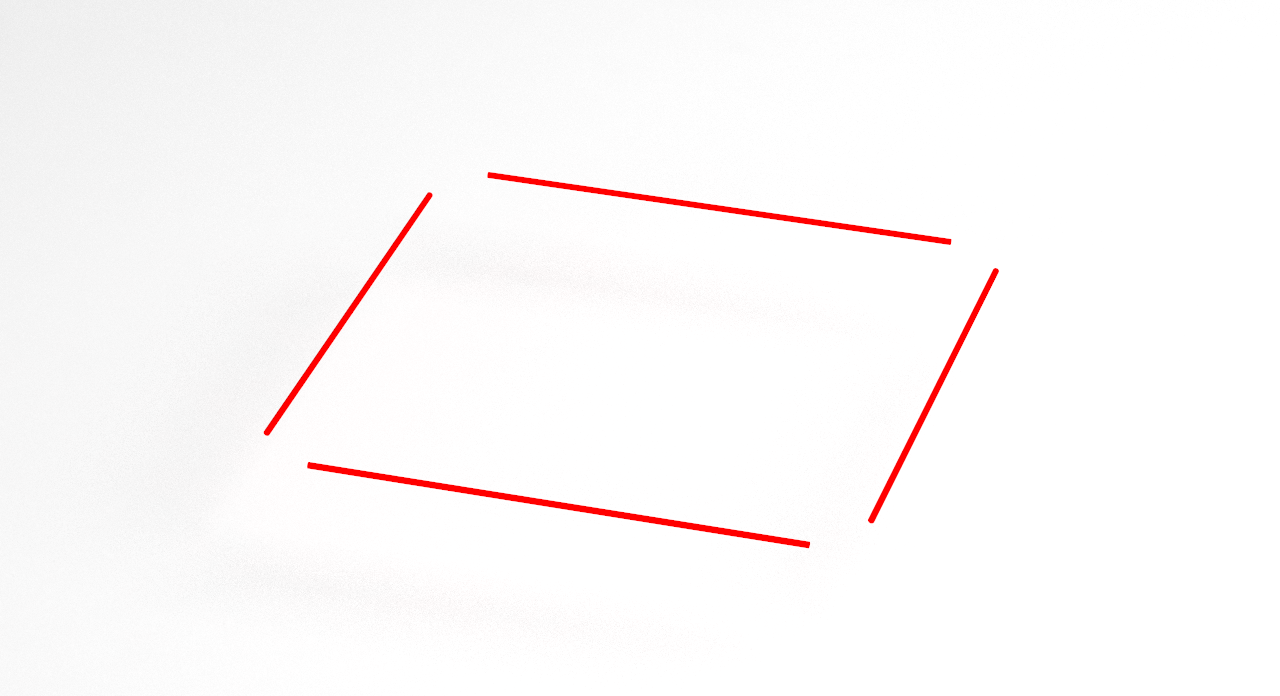
auxiliary carbon fibre tubes
» Made a new quadrotor chassis.
3D printed battery holders
» Made a new quadrotor chassis.

3D printed rangefinder mount
» Made a new quadrotor chassis.
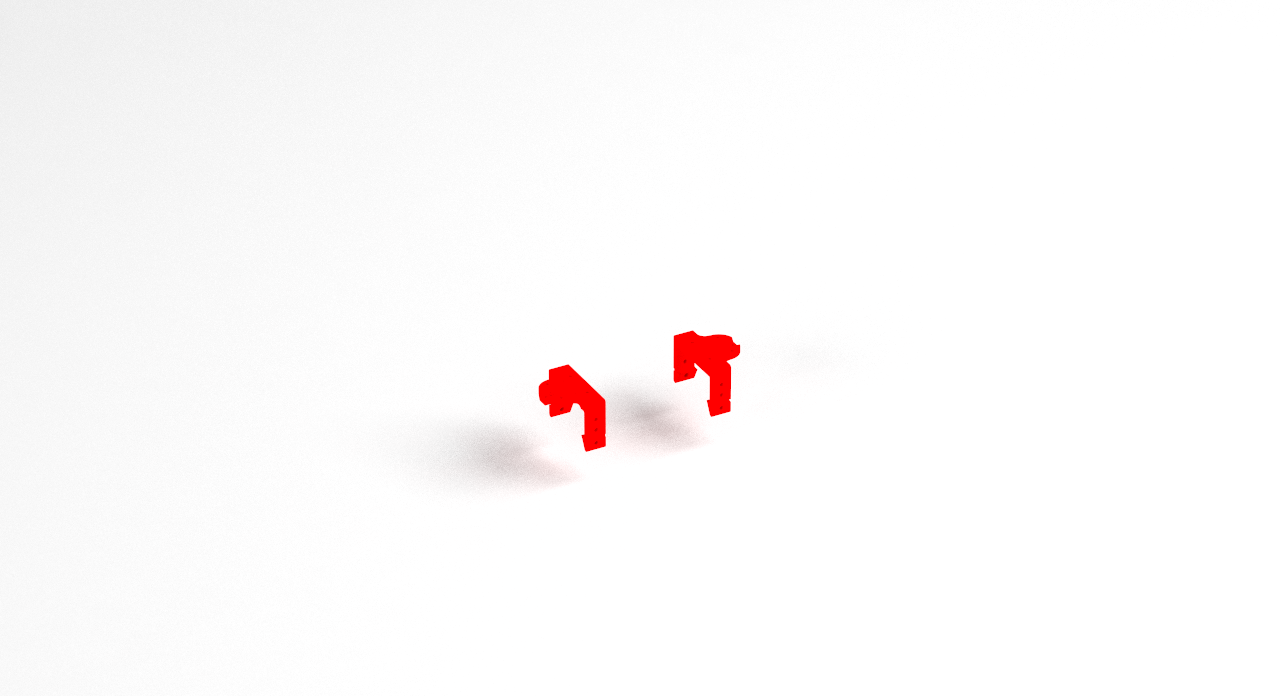
3D printed quadrotor corners
» Made a new quadrotor chassis.
polycarbonate landing gear
» Made a new quadrotor chassis.
steel motor mounts
» Made a new quadrotor chassis.
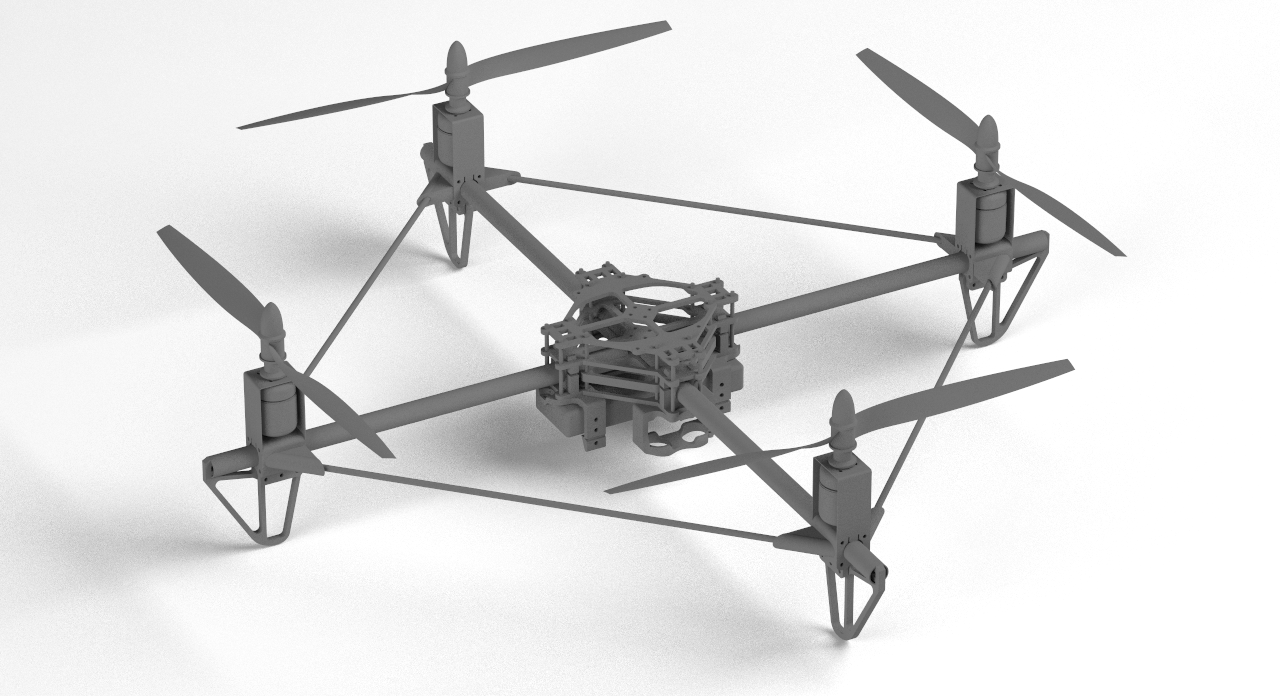
» Made a new quadrotor chassis.
Total weight 1.3 kg, diameter 63 cm.
» Installed off-the-shelf electronics


» Installed off-the-shelf electronics

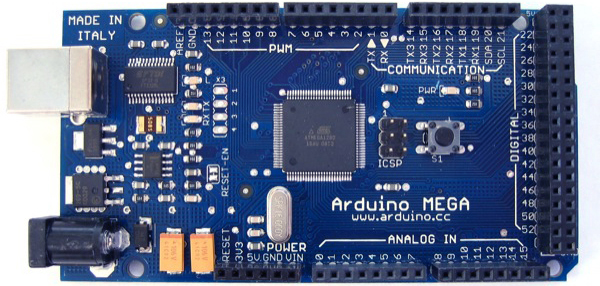
Arduino Mega 2560
» Installed off-the-shelf electronics
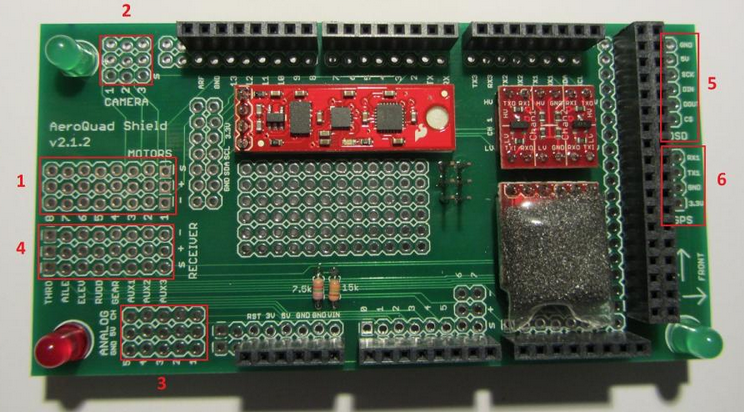
Aeroquad shield (incl. IMU, etc)
» Installed off-the-shelf electronics
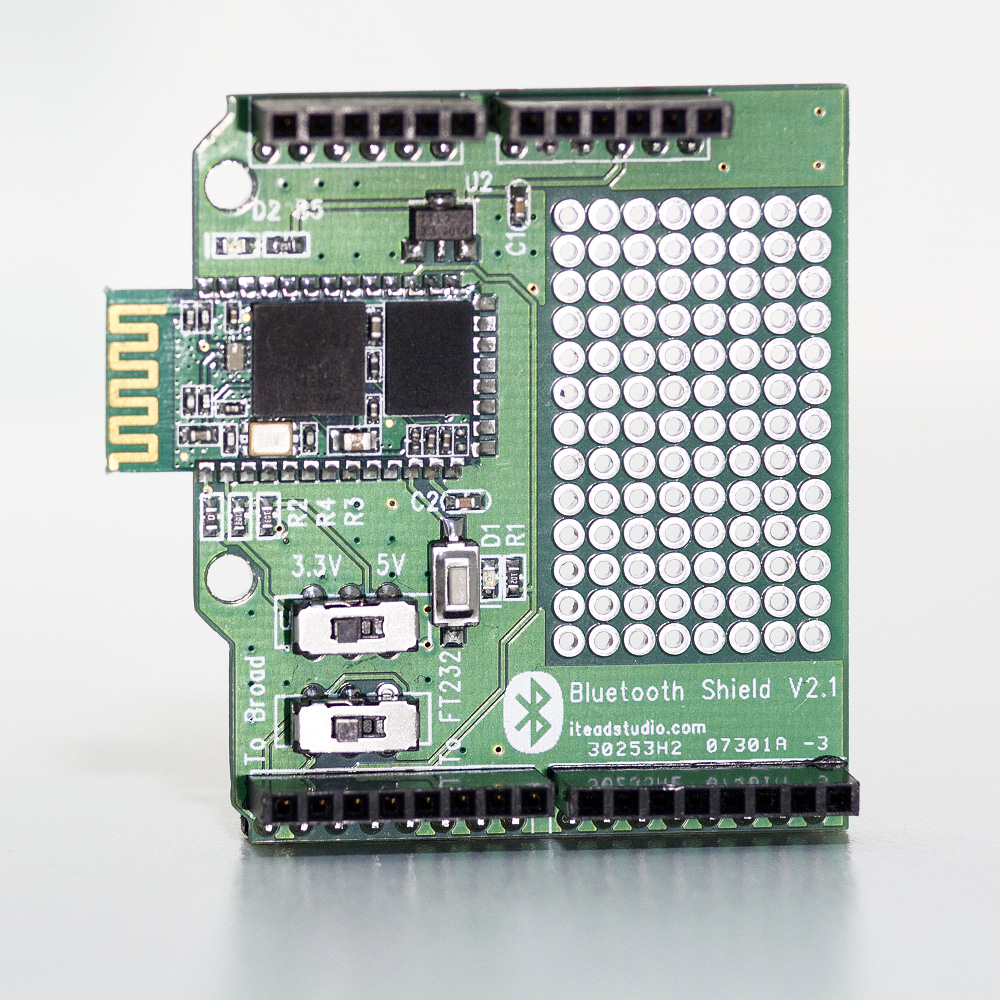
Bluetooth
» Installed off-the-shelf electronics

Remote control
» Installed off-the-shelf electronics
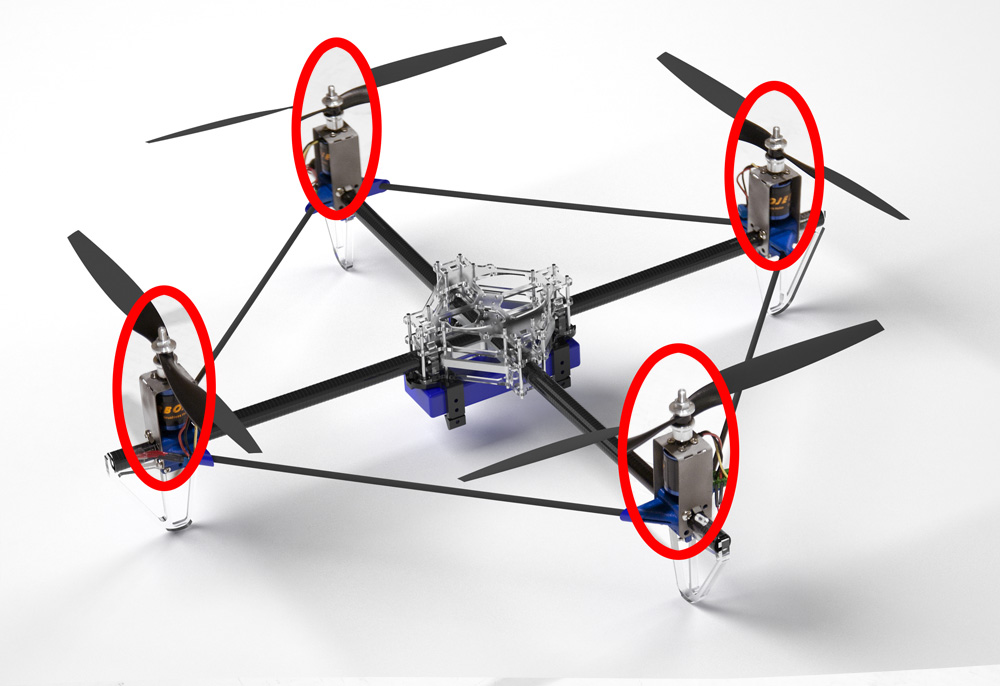
3-phase brushless motor
» Installed off-the-shelf electronics

electronic speed controller (x4)
» Installed off-the-shelf electronics
rangefinder (not shown)
» Installed off-the-shelf electronics
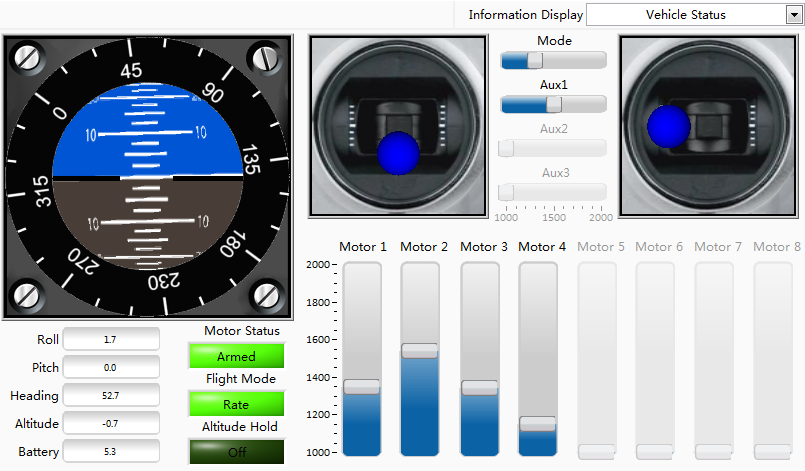
Software
» Flight control
» Object recognition
Speeded Up Robust Feature (SURF) method
» Object recognition
Speeded Up Robust Feature (SURF) method
» Facial detection
Haar's face method
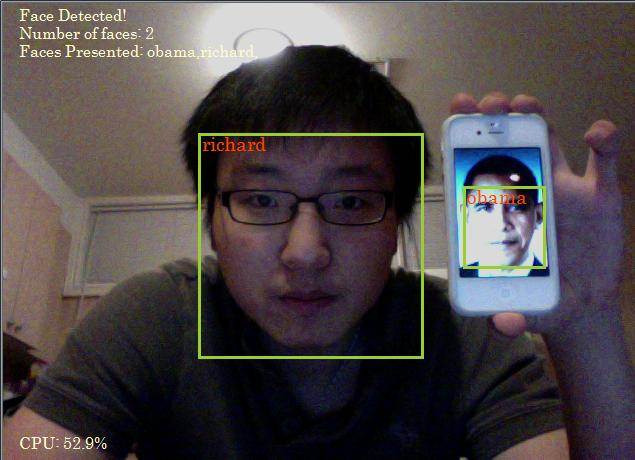
» Facial detection
Haar's face method
» Laser tracking
Pixelate, then find brightest pixel
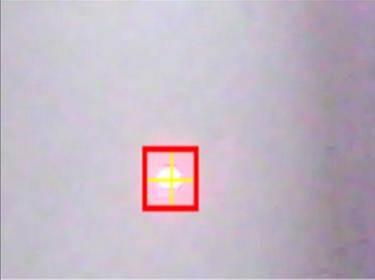
» Laser tracking
Pixelate, then find brightest pixel
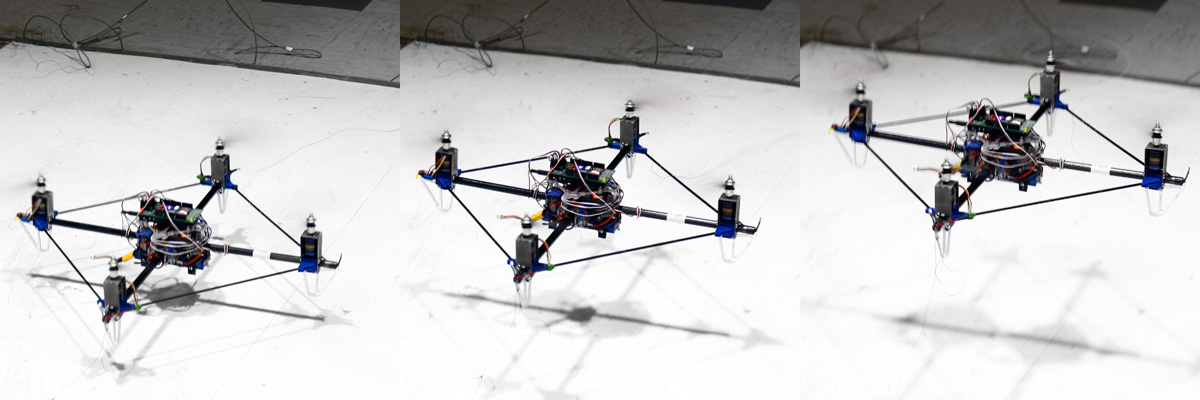
Performance
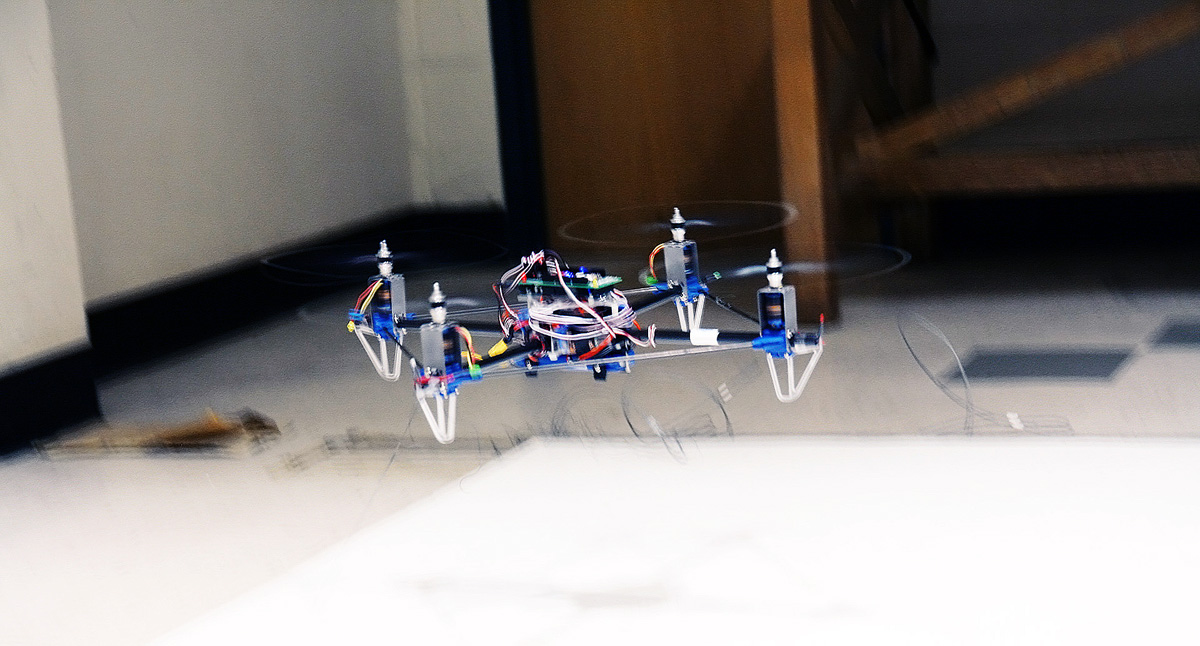
Achieved flight control with remote.
hover, roll, pitch, and yaw
There are some vibrations
some vibrations are visible...
PID is not well-tuned
cannot remain stable for a long time
Conclusion
» Made a quadrotor that is capable of flying autonomously. ✓
» Wrote object recognition software for obstacle avoidance. ✓
» Not enough time to integrate the two. ✗
» Quadrotor PID tuning not satisfactory. ✗